- To Solve Non-Linear: Solve Linear Over and Over Given $g : \Re^n \to \Re^n$, a square non-linear system of equations. The methods we cover assume that the second derivatives of the system are continuous. We wish to find a $x^\star\in \Re^n$ that satisfies $$g\left(x^\star\right)= \overrightarrow{0}.\tag{NLS1}\label{NLS1}$$ A vector that satisfies \eqref{NLS1} is called a root of the system. Since the system $g$ will be computed numerically and the value of the inputs $x$ are stored as a vector of floating point reals, is very likely that we cannot satisfy the equation (*) exactly. So, we will be satisfied if we are "close enough."
- Given $g(x)$, and $x_0\in \Re^n$. Attempt to find a solution to $$g(x^\star) = \overrightarrow{0}.\nonumber$$
- Set $t=0$. Compute $g_t = g(x_t)$.
- Strong convergence: $\|g_t\| \mathop{=_{\epsilon_1}} 0$, then
 . (Here $\mathop{=_{\epsilon_1}}$ means equal with tolerance $\epsilon_1$ that Ox's fuzzy-equal comparison functions implements.)
. (Here $\mathop{=_{\epsilon_1}}$ means equal with tolerance $\epsilon_1$ that Ox's fuzzy-equal comparison functions implements.) - Strong convergence: $\|g_t\| \mathop{=_{\epsilon_1}} 0$, then
- → Compute the Jacobian at the new values, $J_t = Jg(x_t)$.
- Solve $J_ts_t = -g_t$ for $s_t$.
- Set $x_{t+1} = x_t + s_t$.
- Lack of convergence: if $J_t$ is (nearly) singular or $x_{t+1}\mathop{=_{\epsilon_2}} x_t$,
then .
- Increment $t$ and go back to step →.
- Broyden (Approximate Jacobian).
- Given $g(x)$, and $x_0\in \Re^n$.
- Initialize. Set $t=0$; compute $g_0 = g(x_0)$; Set $J_0$ to a (well-conditioned) $n\times n$ matrix. Typically, $J_0 = I$.
- Check for strong convergence: if $\|g_t\|\mathop{=_{\epsilon_1}}0$ then . Otherwise, solve $J_t s_t = g_t$ for $s_t$. Set $x_{t+1} = x_t - s_t$. Check for non-convergence: If $\|x_{t+1}-x_t\| \mathop{=_{\epsilon_2}}0$ possibly reset $J_t$ to $J_0$ or simply .
- Update Jacobian. Compute $g_{t+1}=g(x_{t+1})$ Let $y=g_{t+1}-g_t$. Then $${J_{t+1} = J_t +{(y-J_t s_t)s_t^T\over \|s_t\|}.}\nonumber$$
- Increment $t$ and return to 1.
- Non-linear Systems in Ox The standard Ox package
#import "solvenle"; SolveNLE(func, ax, ...) Argument Explanation ------------------------------------------------------------------------------------ func function evaluating the nonlinear system in the form below ax address of n x 1 matrix with starting values x0 final coefficients are placed in this location x* ... Several optional arguments to control the algorithm (see below)
The two-argument version of a call to SolveNLE(func, ax, iMode, fJac ) Argument Explanation ------------------------------------------------------------------------------------ iMode integer code to choose the algorithm -1 (default) Newton-Raphson with numerical Jacobian if n < 80 modified Newton-Raphson for n >= 80 0 Newton-Raphson using ANALYTIC Jacobian computed by fJac() 1 Newton-Raphson using numerical Jacobian computed by SolveNLE() 2 Broyden's method 3 modified Newton-Raphson that avoids storing nxn Jacobian matrix fJac If iMode==0 then fJac() has to return the Jacobian matrix This would be useful if you have coded the analytic form of the Jacobian and computing numerical Jacobians is expensive.- The supplied
funcargument should have the following format: func(ag, x) Argument Explanation ------------------------------------------------------------------------------------ ag address for where to put the n x 1 vector value of g(x) x n x 1 vector of x values Returns 1: successful, 0: function evaluation failed- Example Suppose $n=1$, a one-dimensional system and $$g(x) = \log x + x^2.\nonumber$$ We know at least one root must exist because: $g(0) = -\infty$ and $g(1) = 1$. So somewhere between 0 and 1 the function crosses the x-axis. A reasonable starting value might be $x_0=1$. Since $x\le 0$ is undefined, so we want to tell the algorithm to stay away from those values.
- Code
25-nle-example.ox 1: #include "oxstd.h" 2: #import "solvenle" 3: myg(fv,x) { 4: if (x<=0) return FALSE; 5: fv[0] = log(x) + x^2; 6: println("%13.8f",x~fv[0]); 7: return TRUE; 8: } 9: main(){ 10: decl x = <1.0>,ccode; 11: ccode = SolveNLE(myg,&x); 12: println("Convergence code: ",ccode,"\nSolution: ",x); 13: }- Output:
Convergence code: 0 Solution: 0.65292
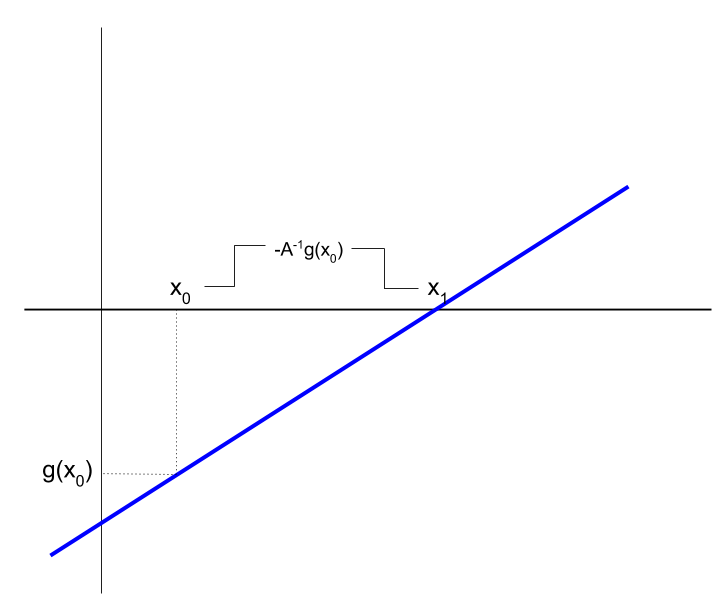
Newton-Raphson is a centuries-old algorithm to find the root of a non-linear system which uses the Jacobian of the system. It "pretends" that the system is linear to from one guess of the root to another. A linear system has a constant Jacobian, so each time the algorithm iterates it recomputes the Jacobian and solves another linear system. To understand Newton-Raphson, start with the situation when the system really is linear. That means we can write $g(x)$ as: $$g(x) = Ax+b,\nonumber$$ where $A$ is a square matrix and $b$ is a $n\times 1$ vector of constants. Of course, if a linear system has a solution it is closed-form: $x^\star = -A^{-1}b$. That is, if we can compute $A^{-1}$, then we can find the $x^\star$ that is the unique root of the system.
Given $A^{-1}$ is available, an iterative or sequential solution is not needed to solve a linear system, but we can think of it like an iteration solution which might help to see how non-linear methods build on linear ones. That is, suppose we started at a guess $x_0$. The value of the system at that point is $g(x_0) = Ax_0 + b$. If we wanted to get to $x^\star$ from there we could say: $$x^\star = x_1 \equiv x_0 - A^{-1}(b+Ax_0) = x_0 - A^{-1}g(x_0).\nonumber$$ In other words, we find the root by subtracting a vector from the initial guess $x_0$. We take a step from $x_0$ to get a new value $x_1$. The size of the step is such that we wipe out the difference $g(x_0)$. Reminder: It is typically inefficient to actually compute $A^{-1}$. Instead, solve linear system $$A s = -g\nonumber$$ to determine a step: $x_1 = x_0 + s.$
Exhibit 38. Linear System as an Iteration
Algorithm 12. Newton-Raphson Iteration
Exhibit 39. Newton-Raphson Iteration
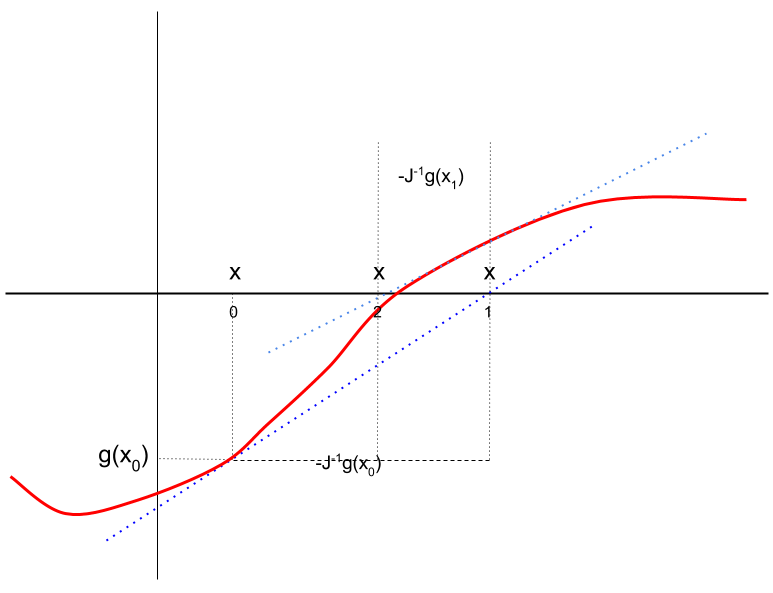
It is not always feasible to program analytic $J$. If numeric $J$ is used, then the number of evaluations required for each step is $1+2n$. If the cost of calculating $g(x)$ is linear in $n$ then computational cost of each step is quadratic in the size of the system $n$.
Although Newton-Raphson converges quickly there is no guarantee that any of the Newton-Raphson step will be an improvement or that it will ever converge. The behaviour depends on $Jg$, which may be badly behaved far from a root. May be near singular and steps may diverge. An alternative discussed next is to use information from past evaluations to build up an approximation to $J_t$ without computing it. Finally, there is no systematic way to use Newton-Raphson to find all roots. Methods to attempt that harder task are not discussed here.
Algorithm 13. Broyden's Method
The key to the algorithm is the updating formula for the Jacobian. It is a good formula because it can be shown that it gets closer and closer to the actual Jacobian as the iteration proceeds and the process progresses. It is more robust to the initial value $x_0$ than Newton-Raphson, but still there is no guarantee of convergence. If convergence fails, restart at final values, which sometimes allows for further progress.
solvenle codes both Newton-Raphson and Broyden. To use it, your program must import the package. Both algorithms are available in one function:
SolvenLE is the basic version. Optional arguments can be sent to control the algorithm. In other words, you code the system of equations as a function which gets called by SolveNLE. The second argument should be an address of a vector (so use &) that contains the starting vector $x_0$. When SolveNLE is finished it puts the final value back in the location sent. So the starting values you send get written over with the final values by SolveNLE.
Exercises
26-poly-roots.ox to find all the roots of the polynomial of $g(x) = 1+x-2x^2-x^3+0.5x^4-0.1x^5$. Then code a function in the form needed by SolveNLE() that uses polyeval() to evaluate the polynomial. Call SolveNLE() and see if it converges to one of the real roots and whether it converges to different roots based on initial values or choice of Newton-Raphson or Broyden. After experimenting, write a program that starts SolveNLE() at different values that converge to different roots.- Write a function called
sys_internal(x)that expects a 2x1 vector and returns $g(x).$ Test your code by sending the vector $\l(\matrix{1\cr 1}\r)$ tosys_internal()and printing the output. You should get g():-1.0000 0.30117 - Write a new function named
sys()that follows the format required bySolveNLEand is a "wrapper" around your simplersys_internal()function:sys(ag,x)
sys_internal()and returns 1. Verify yoursyscomputes the correct value for<1;1>and returns 1. - Use
SolveNLEto solve for a root of the system. Check the convergence code. Try different starting values to see if it finds more than one root. Start at an undefined value (say $x_0=-1$) and see what happens.
- Solve this problem numerically using
SolveNLE()and Broyden's method following examples already done. Start with use of a numerical Jacobian. - Write your main code to start at values near the two solutions and see if they converge to the closest one.
- Code the analytic Jacobian and run Newton-Raphson with it.
- If you increase $v$ from 3 the two roots move closer together until eventually they meet when the line is tangent to the circle. If you go past that point there is no solution. Experiment with changing $v$ to find the tangency and see what happens when no solution exists. Here is a loop that would make it easier to do this ... insert in your main code and adjust $v$. You might also confirm analytically the value of $v$ that results in a unique root and enter it to confirm.
while (TRUE) { scan("Enter v ","%g",&v); // reset your starting/ vector here SolveNLE( ... ); }